伝言を残す
弊社製品にご興味をお持ちで、さらに詳しい情報をご希望の場合は、こちらにメッセージを残してください。できる限り早くご返信いたします。






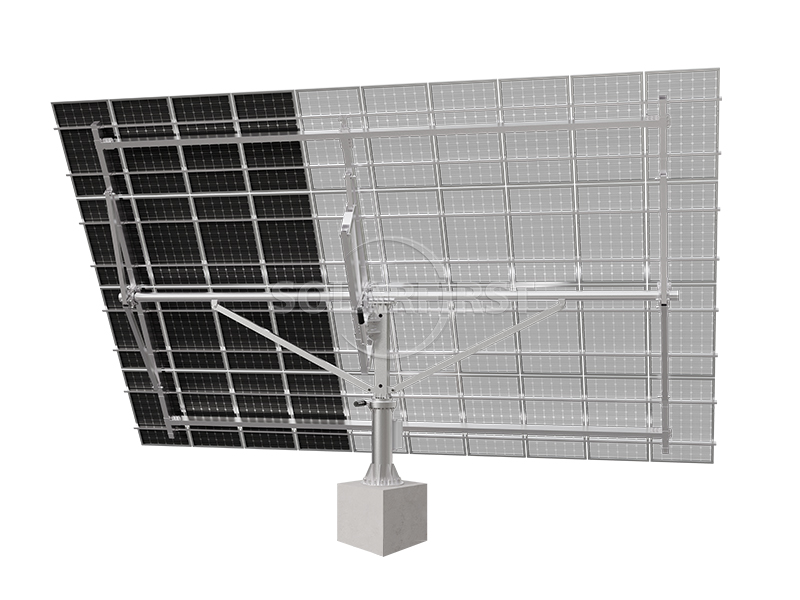

本製品は、水平方向と垂直方向の両方で角度調整を行うことで、太陽光発電モジュールを太陽の位置により効果的に合わせることができる二軸追尾システムです。固定ブラケットや一軸追尾システムと比較して、二軸設計は季節や時間帯を問わず、より高い太陽エネルギー受光ポテンシャルを実現できます。本システムはモジュール式ユニット構成を採用しており、各追尾ユニットは独立して駆動し、遠隔監視機能を備えているため、発電量向上に対する要求が高い地上設置型発電所のシナリオに最適です。
製品説明
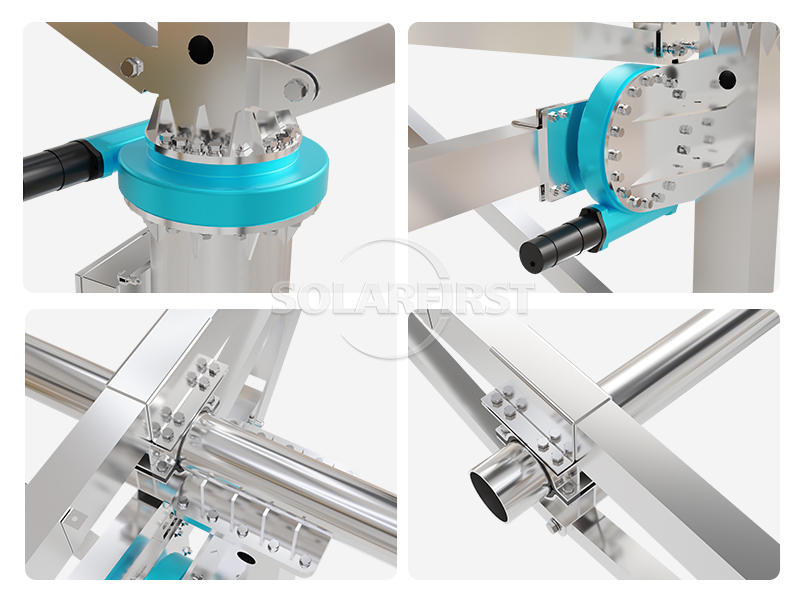
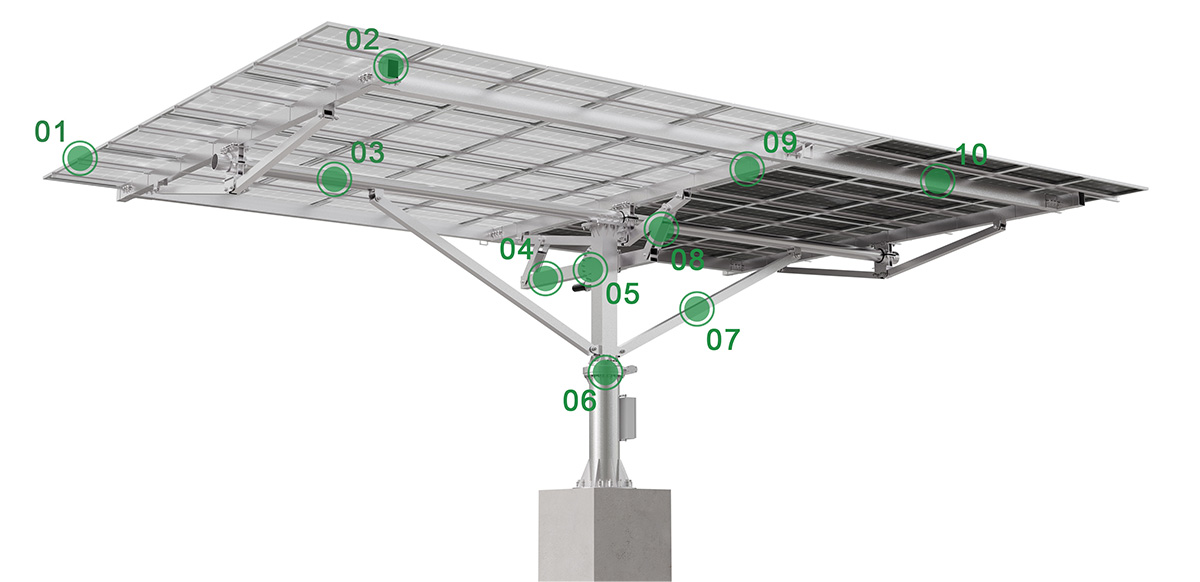
この二軸追尾システムは、支柱、回転減速機、空間フレーム構造、および制御システムで構成されています。各追尾ユニットは最大40個の部品で構成されます(部品数はプロジェクトに応じてカスタマイズ可能です)。水平追尾範囲は±120°、ピッチ範囲は0°~60°で、一日を通しての太陽方位角と高度角の変動範囲を幅広くカバーします。
駆動方式は、閉ループ時間制御とGPS信号アシストを採用しています。MCUコントローラは、位置の緯度経度、リアルタイム時刻、およびオプションの風速計からのデータに基づいて、モータの動作を自動的に調整します。本システムは逆追尾機能をサポートしており、早朝や夕方の時間帯におけるアレイ間の日陰の影響を軽減できます。通信には無線または有線インターフェースが用意されており、保守プラットフォームから各サポートユニットの動作角度、故障状態、その他の情報を一元的に監視できます。また、夜間や強風時の自動リセット機能も搭載されており、長時間の待機中の風荷重や機械的摩耗を軽減します。
製品構成部品
アドバンテージ
▶ 高い適応力:
このシステムは、独立した基礎と調整可能なコネクタを利用して敷地の起伏に対応することで、さまざまな地形の傾斜に適応できるため、地形による制約をほとんど受けません(ただし、大きな谷や急斜面は除きます)。
▶ 高い安定性:
ヘリンボーン型の柱と多点支持格子構造が格子状の配置を形成し、風や雪などの外部荷重を効果的に分散します。構造材には一般的に使用される建築用鋼材を用い、表面の防錆コーティングにより、通常の気候条件下で長期的な耐腐食性を確保しています。
▶ 優れたアクセシビリティ:
各追跡装置は独立して配置されており、隣接する装置間には十分な間隔が確保されているため、相互の障害を最小限に抑え、建設車両、検査員、保守機器の通行を容易にすることができる。
▶ 安全で信頼できる:
本システムは、1対1の独立制御設計を採用しています。各サポートユニットの状態(リアルタイム角度、故障コード、モータ電流など)はシステムプラットフォームを通じて遠隔監視できるため、異常を早期に検知し、単一障害点による長期的な発電損失を低減できます。
▶ インテリジェントトラッキング:
このシステムは、GPSによる時刻同期と太陽位置アルゴリズムに基づいて自動的に追跡を行います。現地のリアルタイム気象情報(雲量、日射量)にアクセスすることで、曇天時には拡散放射の利用を最大化するように追跡戦略を調整できます。逆方向追跡機能により、朝夕の時間帯におけるアレイ配置をさらに最適化できます。
トラッカー構造
| 追跡技術 | デュアルアクシストラッカー |
| システム電圧 | 1000V/1500V |
| 追跡範囲 | 方位角 +120°、仰角 0~60° |
| 作業風速 | 18 m/s(カスタマイズ可能) |
| 最大風速 | 35m/s(カスタマイズ可能) |
| トラッカーあたりのモジュール数 | モジュール数:40個以下(カスタマイズ可能) |
| 主要材料 | 溶融亜鉛めっきQ235B/Q355B、亜鉛-アルミニウム-マグネシウムめっき鋼 |
| 平均コーティング厚さ | ≥65μm |
| 駆動システム | 旋回駆動装置 |
| 基礎の種類 | PHC杭/現場打ち杭/鋼杭 |
制御システム
| 制御システム | MCU |
| 追跡モード | クローズドループ時間制御+GPS |
| 追跡精度 | <2° |
| コミュニケーション | 無線(ZigBee、LoRa)、有線(RS485) |
| 粉末調達 | 外部電源/ストリング電源/自己給電 |
| 夜間自動収納 | はい |
| 強風時の自動格納機能 | はい |
| 最適化されたバックトラッキング | はい |
| 保護等級 | IP65 |
| 動作温度 | -30℃~65℃ |
| 風速計 | はい |
| 消費電力 | 1日あたり0.5kWh |
適用可能なシナリオ
▪ 直射日光の割合が高い地域(中低緯度、乾燥地帯、雲のない地域など)では、二軸追尾の潜在的なメリットは比較的大きくなります。
▪ 年間平均発電量の増加と土地コストの制御に対する高い要求を持つ地上設置型発電所。
▪ 起伏はあるものの、急激な標高変化のない地域で、独立した基礎が必要となる場合。
▪ 遠隔操作および保守、集中監視を必要とする中規模から大規模の発電所。特に無人または最小限の人員配置のシナリオにおいて。
▪ 農業や漁業などの補完的な事業を含む、特定のアクセス要件のあるプロジェクト(支持構造物の基部におけるクリアランスの合理的な増加が必要となる場合)。
重要な注意事項:
▶ 土木工学の要件:
独立基礎の打設位置、高さ、および埋め込み部の精度は、追跡機構の移動軌跡と構造寿命に直接影響します。建設前に、現場調査と基礎設計を実施する必要があります。
▶ 風速リスク:
最大動作風速は18m/sです。この速度を超えると、直ちに強風リセットモードに切り替わり、追跡が停止します。強風や台風が頻繁に発生する地域では、耐風設計レベルを上げるか、物理的な制限装置を追加することをお勧めします。
▶ 電源の信頼性:
各システムは1日あたり約0.5kWhを消費します。停電時には追跡機能が停止します。発電所で断続的な停電が発生した場合は、小容量のバックアップ電源を設置するか、制御回路への電力供給を優先することをお勧めします。
▶ 通信の信頼性:
無線ソリューション(ZigBee/LoRa)は、大規模発電所における信号障害や中継器の設置を考慮する必要があります。一方、有線RS485ソリューションは、配線コストが若干高くなりますが、耐干渉性能が優れており、プロジェクトの規模や環境に応じて選択できます。
▶ 追跡精度に影響を与える要因:
精度 <2°は、良好な校正、センサーのドリフトなし、機械的接続の緩みがない条件下での典型的な値です。実際の運用では、基礎の沈下、風の振動、モーターのヒステリシスなどの要因により精度が低下する可能性があるため、定期的な校正が必要です。
▶ メンテナンスに関する推奨事項:
回転減速機の潤滑油の状態と締結具の締め付け具合を6ヶ月ごとに点検し、センサー表面の埃を清掃し、角度のゼロ点校正を毎年実施することをお勧めします。
▶ 絶対的な性能は保証されません。
二軸追尾システムは、あらゆる気象条件下(例えば、曇天が続く場合、砂嵐、降雪時など)において、固定支持システムと比較して優れた性能を保証するものではありません。実際の発電量増加は、プロジェクトの立地、気候パターン、システムの信頼性などの要因によって左右されます。
まとめ
本製品は、二軸追尾支持システムです。水平方向(±120°)とピッチ方向(0~60°)の二軸運動により、太陽光発電モジュールを太陽の位置により正確に追尾します。モジュール式の独立制御設計を採用し、ヘリンボーン柱とグリッド構造を組み合わせることで、様々な地形に対応し、優れた全体安定性を維持します。各システムには、MCUコントローラ、GPS、およびオプションの風速計が装備されており、閉ループ時間制御追尾、逆追尾、強風時や夜間の自動リセットに対応しています。遠隔状態監視は、有線または無線通信で行います。構造材料は主に溶融亜鉛めっき鋼またはマグネシウムアルミニウム亜鉛めっき鋼です。最大動作風速は18m/s、耐風設計は35m/sです。1ユニットの1日あたりの自家消費量は約0.5kWhです。総じて、高い発電能力が求められ、比較的複雑な立地条件を持つ、大規模および中規模の地上設置型太陽光発電所に適している。
Solar Firstプロジェクトリファレンス
関連する知識ポイント

本製品は、太陽光発電所において、太陽の方位角の変化に合わせてモジュールアレイを支持・駆動するために使用される、水平単軸追尾支持システムです。独立制御とモジュール設計を採用することで、特定の地形条件下における基礎杭の本数を削減し、現在主流となっている大型モジュールとの互換性を確保しています。風洞試験によって全体構造が検証されており、様々な地上設置型発電所の設置環境に適しています。
続きを読む
単軸追尾システムは、太陽光発電所で使用される太陽追尾装置です。単軸回転構造により、太陽光発電モジュールが一日を通して太陽の方位角をほぼ追尾できるため、太陽光発電アレイの発電効率向上に貢献します。本システムはデュアルリンク設計を採用しており、1つの支持ユニットで最大120枚のモジュールを支えることができ、182mmと210mmのシリコンウェハモジュールの両方に対応しています。制御ユニットは複数の電源供給方式と通信プロトコルをサポートしているため、規模や地形条件の異なる発電所プロジェクトに適しています。
続きを読む
本製品は、水平方向と垂直方向の両方で角度調整を行うことで、太陽光発電モジュールを太陽の位置により効果的に合わせることができる二軸追尾システムです。固定ブラケットや一軸追尾システムと比較して、二軸設計は季節や時間帯を問わず、より高い太陽エネルギー受光ポテンシャルを実現できます。本システムはモジュール式ユニット構成を採用しており、各追尾ユニットは独立して駆動し、遠隔監視機能を備えているため、発電量向上に対する要求が高い地上設置型発電所のシナリオに最適です。
続きを読む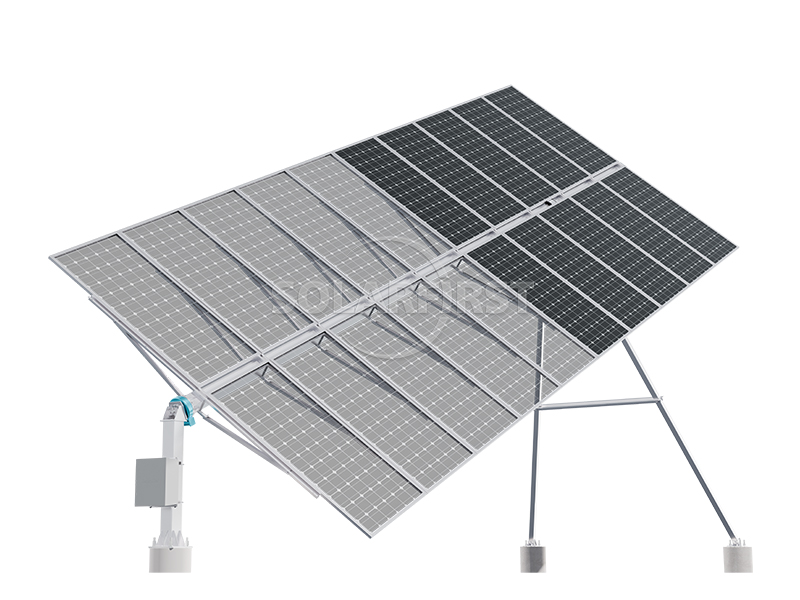
傾斜型単軸追尾システムは、太陽光発電所に適したインテリジェントな追尾ブラケットソリューションです。このシステムは、単軸回転機構を用いて、傾斜軸を中心とした太陽の方位角の変化を太陽光発電モジュールが追尾できるようにすることで、時間帯によって異なる太陽光エネルギーの受光効率を向上させます。複雑な地形条件に最適化されており、山岳地帯や斜面などの不均一な場所にも設置できるため、発電量の増加とエンジニアリング上の適応性を両立させた太陽光発電プロジェクトに最適な選択肢となります。
続きを読む
 en
en fr
fr de
de zh-CN
zh-CN ru
ru es
es pt
pt ja
ja ko
ko ar
ar